
Функція analogWrite()
Клас RobotControl analogWrite()
Записує аналогове значення як ШІМ у визначений порт на роботі. Робот має 8-бітну ШІМ, дозволяючи 256 дискретних рівнів.
Robot.analogWrite() працює лише на...
Функція analogRead()
Клас RobotControl analogRead()
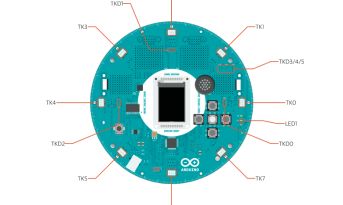
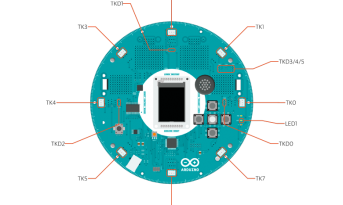
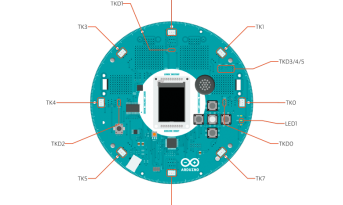
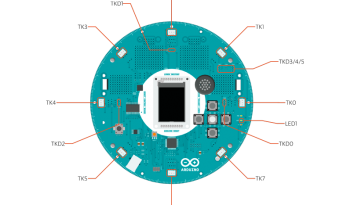
Зчитує значення з визначеного порту на роботі. Порти представлені у вигляді роз'ємів TinkerKit на роботі. Плата має 10-бітний аналогово-цифровий перетворювач. Це...
Функція digitalWrite()
Клас RobotControl digitalWrite()
Записує значення HIGH або LOW у визначений порт на роботі. Порти представлені у вигляді роз'ємів TinkerKit на роботі.
Синтаксис...
Функція digitalRead()
Клас RobotControl digitalRead()
Зчитує цифрові значення з одного визначеного порту. Вони представлені у вигляді роз'ємів TinkerKit на роботі. На діаграмі нижче розміщення пінів.
Синтаксис...
Функція lineFollowConfig()
Клас RobotControl lineFollowConfig()
Змінює параметри руху по лінії. Використовуйте цю функцію, якщо рух по лінії не працює, як очікувалося, або Ви хочете змінити швидкість робота під час...
Функція isActionDone()
Клас RobotControl isActionDone()
Первіряє, чи дія поточного режиму рушійної плати завершена.
Режим руху по лінії надасть сигнал закінчення сигналу, коли досягне фінішної лінії...
Функція pauseMode()
Клас RobotControl pauseMode()
Призупиняє або відновлює дію, задану режимом для нижньої плати.
Для режиму руху по лінії робот зупинить рух по лінії, продовжуючи приймати команди....
Функція setMode()
Клас RobotControl setMode()
Змінює режим робота. Залежно від поточного режиму команди можуть змінюватися.
Синтаксис Robot.setMode(modeName)
Параметри modeName: назва режиму, на який...
Функція begin()
Клас RobotControl begin()
Ініціалізує робота. Має бути викликана у setup() , щоб використовувати специфічні особливості Robot.
Robot.begin() не ініціалізує такі особливості, як звук чи...
Конструктор RobotControl
Клас RobotControl RobotControl
Конструктор порожній. Оскільки безпосередньо доступ до методів можна отримати через об'єкт Robot, Вам не потрібно викликати конструктор.
Параметри нема...
Бібліотека Robot
Robot
Бібліотека Robot включена в Arduino IDE 1.0.5 та пізніші версії.
Robot має ряд вбудованих датчиків і виконавчих механізмів. Бібліотека розроблена для легкого доступу до...
Функція yield()
Scheduler yield()
Передає контроль на інші завдання, коли викликається. yield() має використовуватися у функціях, які потребують деякого часу для завершення.
Синтаксис yield()...
Функція startLoop()
Scheduler Scheduler.startLoop()
Додає функцію до планувальника, що буде працювати одночасно завдяки loop() .
Синтаксис Scheduler.startLoop(loopName)
Параметри loopName: названа...

Революціонізація сільского господарства відбувається завдяки інтернету речей
Фермери використовують високотехнологічні методи ведення сільського господарства для покращення виробництва, а також використовують датчики та інші IoT-технології для ефективнішої роботи
Коли ми...